You will need
- -text editor;
- mouse;
- keyboard.
Instruction
1
Disable automatic insertion of indent for each new paragraph. To do this, select the text you want to edit, or the whole text. If you need to fix only one paragraph, you can just put the mouse cursor anywhere in the text of this paragraph.
2
Go to the Home tab and then under "Paragraph" on the arrow button. Opens a new dialog for "Paragraph". To cause it another way: click the right mouse button in any part of the text from the drop-down menu, select "Paragraph" by clicking on it with the left mouse button.
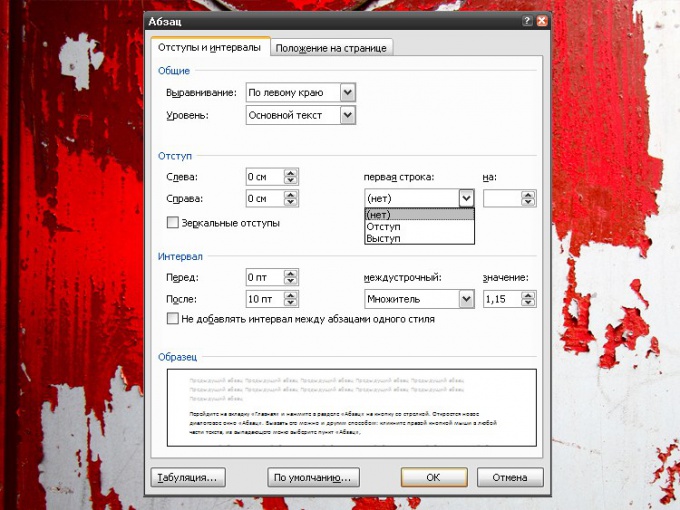
3
In the opened window go to tab "Indents and spacing". In the section "Indentation" in the field "First line" install using the drop-down list set to No. Click OK in the lower right corner of the window to the new settings took effect. Dialog "Paragraph" will be closed automatically, the red line in the text will be deleted.
4
You can also edit the text. Install the mouse cursor before the first printed character in a new paragraph, and then press Backspase. The line will shift to the left. If the red line in the text was inserted automatically or by pressing the Tab key, it will be enough.
5
If the red line was inserted by repeated pressing the Space key (Spacebar), you need to remove all whitespace characters before the start of the text. Make visible the hidden formatting characters. To do this, go to the Home tab and click in the "Indent" button with the symbol "¶".
6
After clicking all non-printing characters are visible. The gap denoted by the symbol "•". How many times was the key pressed is Space, as many characters will be in the text. Delete them using the Backspace or Delete key. To return to the normal view of the document, press again on the button "¶" in the section "Paragraph".

