You will need
- - threads;
- - the spokes;
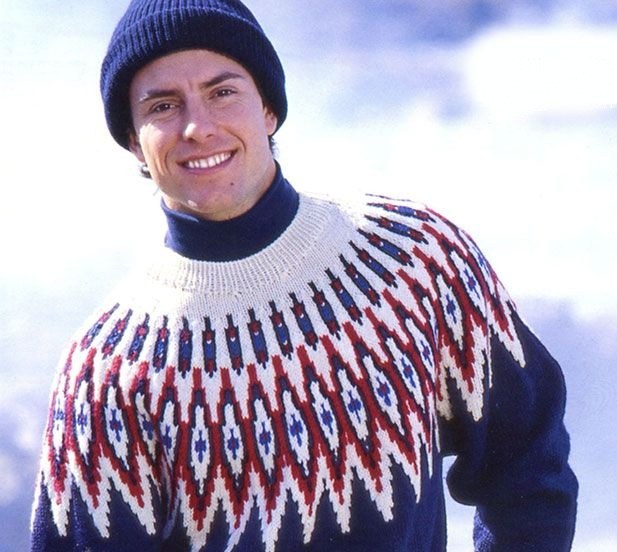
- diagram of the yoke;
- - cm tape.
Instruction
1
Before you begin knitting, make a diagram of the yoke. Measure with measuring tape the required distance, link the specimen and determine the density of the knit. Then calculate how many loops it is necessary to subtract and how many parts you can split the yoke.
2
If you need a pattern, note its proportions when drawing up the scheme. Subtraction can be done at an equal distance (for example, every four rows) or the light pattern. In the second case, the larger figure put at chest level, then make a sharp reduction (pattern – stripes or small items), then at shoulder level, place the small figure and the area of the gate again hold the contraction.
3
In order to knit the yoke with jacquard pattern, use the ready-made diagram. Often the schema for the Basque depicted in the form of a pyramid – divide your knitting for a specified number of parts (e.g., colored thread) and repeat the pattern on each piece. Subtraction and gain also make symmetrically on each part. To stripes of different colors are not mixed up between them, immolate them in plastic bags.
4
To knit the yoke knitting from the bottom up, first prepare the sleeves, the front and the back. When these details are ready, assemble them on long circular needles. To get the armhole, proceed as follows: provarite loop forehand, 10-12 loops translate into an additional needle or a pin.
5
Add loop sleeve, loop back. The next 10-12 loops send an additional pin or needle. Next, attach the loop of the second sleeve and davaite the shelf (if it consists of two parts).
6
Knit pattern for the scheme. Subtraction do promazyvaya two loops together. After knitting the yoke and gate, connect the loops collected for extra knitting needles, knit stitch.
7
It is also possible to knit the yoke knitting from the top down. For this, provatas circle gate expand gradually knitting, adding loops on the diagram. Once you davaite up to his armpits, divide the knitting of three tubes, adding at the bottom of the armhole to the 10-12 STS on each side. Next, knit the parts separately.